forked from xtdrone/XTDrone
2.8 KiB
2.8 KiB
XTDrone
介绍
这是基于PX4和ROS的无人机仿真平台(目前模拟器使用Gazebo,与Airsim的连接正在开发中)。目前支持多旋翼飞行器(包含四轴和六轴)、固定翼飞行器、可垂直起降固定翼飞行器(包含quadplane,tailsitter和tiltrotor)和无人车。在XTDrone上验证过的算法,可以方便地部署到真实无人机上。
单机仿真架构如下图所示,详见论文
Xiao, K., Tan, S., Wang, G., An, X., Wang, X., Wang, X.: Xtdrone: A customizable multi-rotor uavs simulation platform. arXiv preprint arXiv:2003.09700 (2020)

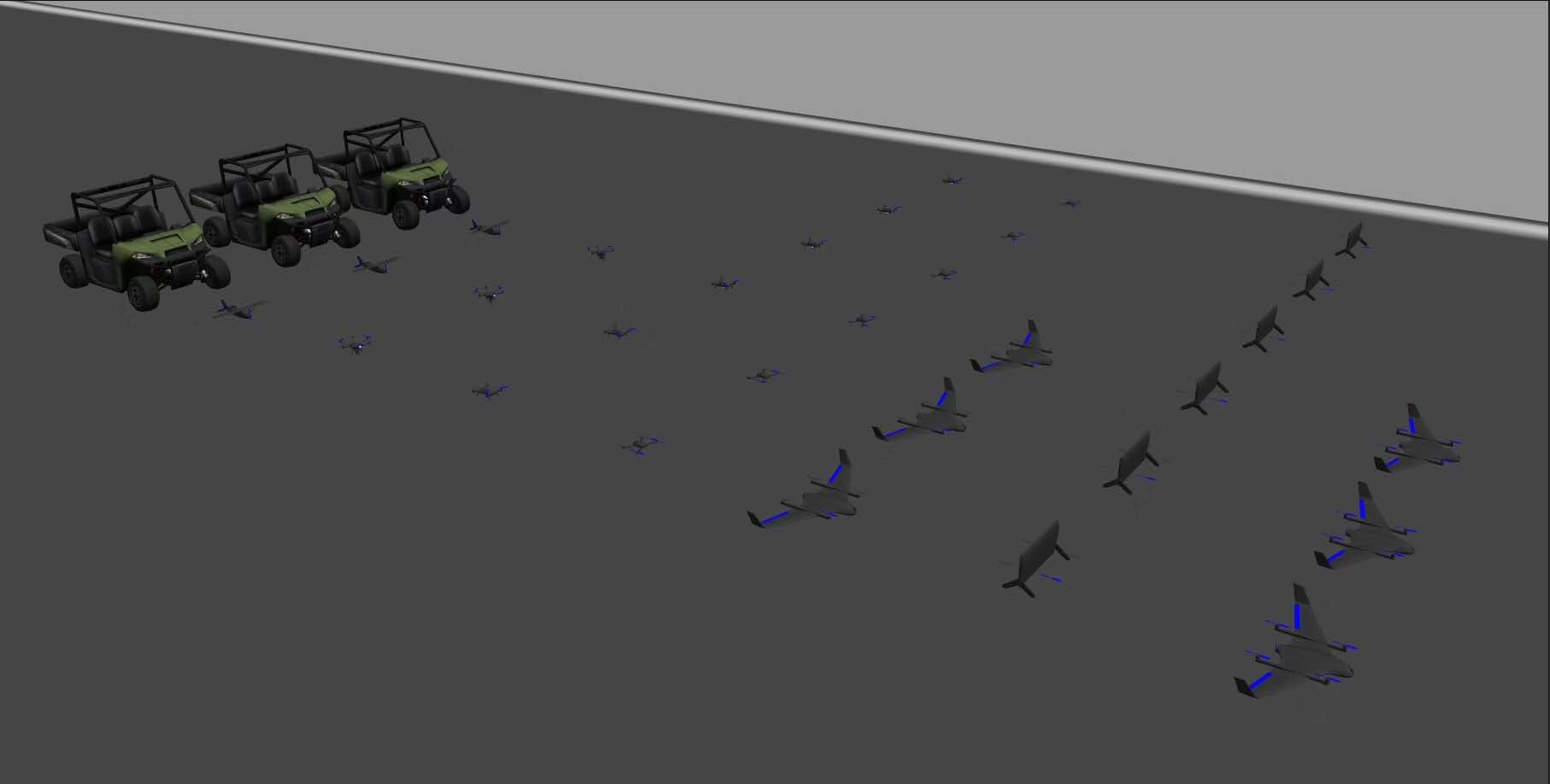
多机仿真架构如下图所示,详见论文
Xiao, K., Ma, L., Tan, S., Cong, Y., Wang, X.: Implementation of UAV Coordination Based on a Hierarchical Multi-UAV Simulation Platform. arXiv preprint arXiv:2005.01125 (2020)

在这个平台上,开发者可以快速验证算法。如:
- 目标检测与追踪
- 双目SLAM
- RGBD-SLAM

- 2D激光SLAM

- 3D激光SLAM

- 视觉惯性导航
- 运动规划

- 多机协同


- 固定翼

- VTOL

- 自动驾驶

教程
空中机器人大赛
2020中国机器人大赛暨RoboCup机器人世界杯中国赛中国机器人大赛正在报名中,详细可参见大赛官网,XTDrone作为无人机仿真组的仿真平台,将第一次正式登上舞台,详细比赛规则可参见附件。
项目团队
- 创立者:肖昆,谭劭昌
- 指导老师:王祥科
- 开发团队:肖昆,谭劭昌,王冠政,马澜,王齐鹏,管若乔,陈科研,陈皋
感谢贡献者们
孙长浩 何瑶